WRC fogadás az ebs spbget "leti"-ben való publikálásra. Függőleges daruk - cél, készülék, tervezési jellemzők Ismertesse a felső elektromos daru vezérlését
A 11.1. ábra az iparágban legelterjedtebb felső daru diagramját mutatja, amely a következő alkatrészekből áll: vezérlőkabinok 1 , daru mozgó mechanizmus2 , kocsi tápkábel 3, elektromos berendezések 4 , híddaru5 , teherkocsi 6 , a fő áramszedő felszerelése7 , troli szervizkabinok 8.
11.1. ábra
A daruhíd a futókerekekre támaszkodik, és a műhelyfal felső részének párkányain elhelyezett darupályákon mozog. A daru futókerekeit a daru mozgási mechanizmusai hajtják, amelyek a hídfesztáv platóira szerelt külön hajtásokból állnak.
Kosár a híd főgerendáira rögzített két sín mentén mozog. Az elektromos berendezések a híd peronjain, a kocsin és a vezérlőfülkében találhatók. A darut a daru futópályái mentén elhelyezett merev sarokkocsikon keresztül táplálják.
A kocsi mechanizmusait mozgatható kocsik segítségével egy speciális egysínű pályán felfüggesztett rugalmas kábel látja el.
Az emelőgép működési módja ciklikus. A ciklus abból áll, hogy a terhelést egy adott pályán mozgatják, és a gépet visszaállítják eredeti helyzetébe egy új ciklushoz. A daru működési ciklusában bármely mechanizmusának bekapcsolási (munka)ideje felváltva e mechanizmus szünetidejével (egy másik mechanizmus bekapcsolásakor, a rakomány fel-, illetve lecsatolásakor, vagy technológiai szünet következik be).
Jelenleg különféle vezérlőrendszereket használnak a felső daruk elektromos hajtásaihoz. Az egyik legfejlettebb az egyórás váltakozó áramú elektromos hajtások rendszere totny konverterek és vezérlés a vezérlőről, melynek sémája a 11.1. Az átalakítókat frekvenciaváltóként használjákMOVITRAC -31 С110-503-4-00 ésС370-503-4-00 cégekSEWErodrive , amelyeket egy közbenső DC körrel és az inverter kimeneti feszültségének szinuszos impulzusszélesség-modulációjával (PWM) hajtanak végre. A készülékek közvetlenül 3×380-3×500 V feszültségű, 50 (60) Hz frekvenciájú háromfázisú váltakozó áramú hálózatra csatlakoznak. A háromfázisú kimeneti feszültség változását a hálózati feszültség értékére biztosítják arányosan növekvő kimenőfrekvenciával az alapfrekvencia állítható értékéig, amely 50 ... 150 Hz tartományba esik (speciális jellemzők esetén). 5 és 400 Hz között). Ez a funkció lehetővé teszi a háromfázisú vezérlést IM állandó nyomatékkal a névleges frekvenciáig, és felette - állandó teljesítménnyel.
A kezelői poszt a billentyűzet alapján valósul megFBG 31C-01, amely tartalmaz egy szöveges kijelzőt háttérvilágítással, három választható nyelvet és egy membránpanelt hat gombbal. A kijelzőn egy bővített és egy rövid opciómenü látható. A billentyűzet biztosítja: a kimeneti frekvencia, áram, hőmérséklet és egyéb mért értékek kijelzését; hibaelhárítás; az összes paraméter leolvasása és javítása; adatok mentése. Ergonomikus joystick típusú kézi manipulátorok emelő és mozgó mechanizmusok vezérlésére szolgálnak.
A futódaru elektromos hajtásainak vezérlőrendszere a vezérlőn van megvalósítva azzal a lehetőséggel, hogy az RS-485 soros interfészen keresztül kommunikáljon egy PC-vel, hogy információt cseréljen a felső vezérlési szinttel és a távvezérlő szinttel.
11.2.2 Portáldaru vezérlőrendszer
A portáldarukat főként épületek építésére, hajók be- és kirakodására használják tengeri vagy folyami kikötőkben. A be- és kirakodás és egyéb munkák elvégzését többféle, különböző teljesítményű elektromos hajtás biztosítja. Hajtásként frekvenciaváltóval vezérelt váltakozó áramú motorokat használnak. Tekintsük egy Sokol típusú, teljes forgódaru vezérlőrendszerét.
A daru diagramja a 11.2. ábrán látható, ahol1 - a rakomány elfordításának mechanizmusa; 2 – mechanizmus a gém megváltoztatására;3- gépház; 4,8 – forgató mechanizmusok; 5 - kábeltekercselő dob; 6 - kabin; 7 – központi áramgyűjtő;9, 15 - zsákutca végálláskapcsolók; 10 - kábel végálláskapcsoló; 11,14 - mozgási mechanizmusok; 12,13 - sínfogantyúk; 16 - végálláskapcsoló perepazovanie.

11.2. ábra
A géptérben található: vezérlőpult, kezelőállomás (OP27 kijelző), váltóáramú motorok emelő- és zárószerkezetekhez, ventilátormotorok, féknyomók, frekvenciaváltók, vezérlő intelligens bemeneti és kimeneti modulokkal, kábeles kommunikációs csatorna a vezérlő és a vezérlőpanelek, egy állomási markoló zárás vezérlő.
A daru vezérlőrendszere a vezérlőn alapul SIMATIC S7-400 cégek Siemens. Minden mechanizmust ipari hálózatok vezérelnek Sinec L2 és Profibus- D.P.. A vezérlőrendszer fő alrendszereinek kommunikációja intelligens modulon keresztül történik ET200Nés a fenti hálózatok. A vezérlőrendszer a következő működési algoritmusokat valósítja meg: daru emelési és zárási hajtásának vezérlése, gém vezérlése, forgásszabályozás, daru mozgásának vezérlése, sínfogók vezérlése, több mechanizmus egyidejű működtetése, vészüzemmód .
Liftvezérlő rendszerek
A felvonó fő részei: csörlő, fülke, ellensúly, vezetőfülke és ellensúly, aknaajtók, sebességhatároló, vonókötelek és sebességhatároló kötél, gödör szerelvények és alkatrészek, elektromos berendezések (beleértve a vezérlő rendszer).
A felvonók emelőszerkezeteiben különféle típusú elektromos hajtásokat használnak.
NÁL NÉL a szabályozatlan hajtás egy- és kétsebességes váltakozó áramú motorokat használ. Egysebességes szabályozatlan aszinkron hajtást használnak az alacsony sebességű felvonókban, amelyek alacsony követelményeket támasztanak a kabin megállításának pontosságával szemben. A hajtás tápáramköre egysebességes aszinkron motort tartalmaz, mókuskeretes rotorral. Az érintkezők lehetővé teszik a motor fel-le mozgását a tápfeszültség fázissorrendjének megváltoztatásával. Az elektromágneses féket egyenirányító hajtja, és biztosítja, hogy a fék feloldódjon, amikor a hajtás be van kapcsolva, és a fék behúzódik, amikor a hajtás ki van kapcsolva, amikor az autó megközelíti a célpadlót.
A kétsebességes aszinkron felvonóhajtás mókuskalickás motort használ két nagy és alacsony fordulatszámú állórész tekercseléssel. A felvonómotorok kis fordulatszámú tekercselésében a póluspárok száma jellemzően három, négy vagy hatszorosa a nagy sebességű tekercsben lévő póluspárok számának, így a szinkron sebesség ugyanennyivel csökken.
A változtatható egyenáramú hajtás hasonló feltételeket biztosít, és az optimálishoz közeli felvonófülkék mozgásdiagramjának kialakítására szolgál, valamint magas fékezési pontosságot biztosít.
A modern felvonókban két szabályozási elvet alkalmaznak: nyitott és zárt. Nyílt hurkú elven a logikai vezérlőrendszerben (vezérlőállomás) generált jelek a csörlőhajtás vezérlésére szolgálnak. A kabin és a csörlő paramétereinek működés közbeni esetleges változásait nem veszik figyelembe.
A zárt elv lehetővé teszi az összes paraméterváltozás figyelembevételét és a hajtás vezérlését a logikai vezérlőrendszertől kapott jelek szerint, valamint a hajtás működési eredményeinek figyelembevételét. Ennek eredményeként a hajtásvezérlő rendszer lehetővé teszi a megállás pontosságának növelését, a fülke mozgásának egyenletesebbé tételét.
Aszinkron elektromos hajtás fordulatszámának frekvenciaszabályozási rendszereOVF 20 cégekOtis PWM alapján készült, és két fő komponensből áll: a vezérlőpanelbőlMSV II és teljesítmény szakasz. Funkcionális diagramOVF 20 ábrán látható. 11.3.
A tápegység egy áramkörből áll az elektromos hálózathoz való csatlakozáshoz és egy konverterből, amely egy vezérelhetetlen háromfázisú teljes hullámú egyenirányítóból, egy egyenáramú kommunikációs vonalból és egy háromfázisú inverterből áll. A háromfázisú elektromos hálózat feszültségét az egyenáramú kommunikációs vezetékben lévő szűrő egyenirányítja és simítja, majd a tranzisztoros inverter adott sorrendet használ. átkapcsolásIGBT -tranzisztorok az egyenfeszültséget PWM segítségével háromfázisú, változó frekvenciájú váltakozó feszültséggé alakítják át. A tranzisztorok nagy kapcsolási sebességet biztosítanak (10 kHz vivőfrekvenciával).

11.3. ábra
A kimeneti értékekre vonatkozó információ a motor tengelyén található BR sebességérzékelőből származik. Kétcsatornás (sávos) kódolót használnak a jelek 90 ° -os fáziseltolásával GBA633 A1 (1024 impulzus minden sávhoz). Vezérlő MCS 220 -vel kommunikál OVF20 (vezérlő jel VI... V4 , négy bittel kódolva; UIB, DIB, SEM– egy-egy bittel kódolt jelek; lift aktuális állapotjelzései D.S.1 ... D.S.3 három bitben kódolva). Jelek UIB, DIB, SEM olyan adatok, amelyek meghatározzák a rendszer kezdeti állapotát OVF 20 működés előtt, azaz a lift fel-le tanulási módban vagy normál üzemmódban működik.
A zárt hurkú fordulatszám-szabályozás precíz és kényelmes vezetési viselkedést garantál a működés minden pillanatában. A mért motorfordulatszám egy PI típusú fordulatszám-szabályozóba kerül. A fordulatszám-szabályozás dinamikus pontossága (az az idő, amely alatt a fordulatszám-szabályozó rendszer a fordulatszám-hibát megoldja) nagy.
A vezérlőrendszer működésének algoritmusa (11.4. ábra) a fő algoritmusból, a vezérlőrendszer különböző működési módjait megvalósító alprogramok algoritmusából (revíziók, feloldás, vezérlés a gépházból, normál működés, tűzveszély), ill. további szubrutinok algoritmusai, amelyek normál üzemmódban végrehajtott tipikus műveleteket valósítanak meg (liftmozgás parancsra, autó megállása a padlón).

11.4. ábra
Az algoritmus a lift és a munka (blokk1 ), amely után megkezdődik a biztonsági lánc állandó felügyelete (2 ). Ha az áramkör szakadt, akkorAvaa lift vészleállítása (3 ). A vészleállítás okától függően a kioldó üzemmód kerül alkalmazásra (5 ), ha a felvonófülke biztonsági berendezésekre vagy végálláskapcsolókra van felszerelve, vagy a rendszerben más jellegű meghibásodást észlel és megszüntet ( 6 ). Blokkok7...9 határozza meg a lift egyik vagy másik üzemmódjának bekapcsolásának szükségességét, blokkokat 10...12 implementálja a megfelelő szubrutinokat. A program mindaddig folytatja munkáját, amíg a lift kénytelen leállni.
A normál működési módot megvalósító szubrutin-algoritmus sémáját a 11.5. ábra mutatja.

11.5. ábra
Ebben az üzemmódban tűzvédelmi ellenőrzés történik (2 ), minden hívás és megbízás regisztrációja és végrehajtása, a kabin leterheltségének ellenőrzése. Ez az algoritmus a rendszer működésének figyelembevételével készült kollektív lefelé vezérléssel, pl. áthaladó hívások akkor történnek, amikor a kabin lefelé mozog (ha a terhelés kisebb, mint a névleges 90%-a), így Így az alprogram hívásvárakoztatást és regisztrációt valósít meg (3 , 4 ),a felvonófülke helyének ellenőrzése a hívószinten (5 ). Ennek függvényében a kabinajtók nyitása a lift utólagos működtetésével parancsra történik (6, 7 ) vagy a fülke foglaltsági állapotának ellenőrzése (8 ). Ha a kabin szabad, akkor a blokkok 9… 20 végezze el a kabin mozgási irányának megválasztását, és ennek függvényében a megrendelés átvétele után lefelé haladva átmenő hívások történnek (ha regisztrálva vannak) (14... 20 ) vagy az autó áthelyezése azon emeletek közül a legmagasabbra, ahonnan hívások érkeztek, majd a parancs kézhezvétele után a kollektív irányítás a lefelé mozgáshoz.
Ha a fülke foglalt hívás regisztrálásakor, a hívás akkor indul, amikor a fülke követi, feltéve, hogy a névleges terhelés 90%-ánál kisebb mértékben van terhelve. Ellenkező esetben (11.6. ábra) várja meg, amíg a kabin felszabadul, vagy ugyanabba az irányba halad, 90%-nál kevesebb terheléssel (21 ...29 ).

Ez a cikk a felső daruk általános elrendezését mutatja be.
A felső daru egy speciális emelőberendezés, amelyet nagy és nehéz terhek mozgatására használnak. Ezeket a terveket széles körben használják ipari helyiségekben, autójavító állomásokon, raktárakban és más vállalkozásokban.
Szerkezetileg a felső daruk több csoportra oszthatók:
- felfüggesztés és támogatás;
- egy- és kétsugaras;
- kézi és elektromos hajtás.
A referenciamodellek a darugerendákon rögzített sínek mentén mozognak. A műhely oszlopainak felső részének párkányaira vagy felüljárókra vannak felszerelve.
Felfüggesztéses (bal) és támasztó (jobb) típusú daruk.
Az egysugaras modellek egy gerendából, a kétsugaras modellek kettőből állnak. Azokhoz a véggerendákhoz csatlakoznak, amelyekbe a futókerekek be vannak szerelve.

Egy- és kétgerendás daruk.
A kézi működtetésű daruknál a csigakerekes fogaskerekeket mozgatási mechanizmusként használják. A meghajtó egység egy tengely vonókerékkel és lánccal. Általában a kézi modelleket kis rakományok hivatalos célú mozgatására használják.

Függőleges daru kézi hajtással.
A felső daru fő alkatrészei és mechanizmusai
A híddaru szerkezete összetett. Tekintsük részletesebben.
Általában egy ilyen daru sínekkel ellátott kifutópályákból, gerendából vagy hídból és egy mozgó kocsiból áll. A kocsi rakományemelő mechanizmussal van felszerelve. Ez lehet egy vagy több, a gyártás követelményeitől függően.
A készüléket elektromos hajtás hajtja. Ennek köszönhetően a felső daru képes felemelni és leengedni a terhet, mozgatni a kocsit és a gerendát.
Az ilyen darut a távirányító manipulációi vezérlik, amely egy felfüggesztett kabinban vagy a műhely alján található. A daru felszerelését daru állványra vagy a szoba oszlopai és szerkezetei segítségével hajtják végre.

Felső daru készülék
Tekintsük részletesebben a felső daruk fő alkatrészeit és mechanizmusait.
Darunyomok
 A darupályákat a berendezések mozgatására használják. Arra is tervezték őket, hogy a daru súlyát egyenletesen osszák el az alapon. A tartó egygerendás daruk kis és közepes teherbírásúak, mozgatására vasúti sínek szolgálnak.
A darupályákat a berendezések mozgatására használják. Arra is tervezték őket, hogy a daru súlyát egyenletesen osszák el az alapon. A tartó egygerendás daruk kis és közepes teherbírásúak, mozgatására vasúti sínek szolgálnak.
A jelentős súly (20 tonna vagy több) mozgatására alkalmas szerkezeteket speciális darupályákra szerelik fel. Mivel az ilyen daruk jelentős terhelés mellett működnek, szigorú követelmények vonatkoznak a daru futópályáira a forgóvázak kisiklásának és egyéb meghibásodásának elkerülése érdekében.
A forgóváz leválásának megakadályozása érdekében a kerék szélességének nagyobbnak kell lennie, mint a sín szélessége. A tervezésnél ne feledkezzünk meg arról, hogy a síneket kis hitelesített hézaggal kell lefektetni, különben a hőtágulás balesethez vezethet. Ha azonban a rések túl nagyok, akkor lökésszerű terhelések hatnak a kerekekre, ami gyors meghibásodáshoz vezet.
Darukezelő eszközök (motor, fékrendszer)
 A felső darut elektromos motor hajtja. Általában három vagy négy motort használnak. Ezek közül kettő a kocsi közvetlen mozgatására van felszerelve. A többi a rakomány emelésére szolgál, és általában a kocsin található.
A felső darut elektromos motor hajtja. Általában három vagy négy motort használnak. Ezek közül kettő a kocsi közvetlen mozgatására van felszerelve. A többi a rakomány emelésére szolgál, és általában a kocsin található.
Mivel a szállított terhek tömege jelentős, a tehetetlenségi tömegek is kiegyensúlyozást igényelnek. Erre a célra egy fékrendszert használnak, amely leállítja a berendezést.
Leggyakrabban zárt típusú fékeket használnak, amelyek a kocsi álló helyzetében blokkolják a kerekeit. A mozgás megkezdéséhez csak mozgassa a rögzítőkart. Baleset esetén a fékek automatikusan működésbe lépnek, leállítva a szerkezetet. A simább fékezés érdekében sarufékeket használnak.
Ha a kocsi sebessége nem haladja meg a körülbelül 32 métert percenként, a fékegységeket és a felső daruszerkezeteket nem használják.
Emelőszerkezet (csörlő, kocsi)
A futódaruban a működtető emelőkar egy kocsi és egy csörlő. A kocsi tartós acélból készült. Kialakítása olyan, hogy a mozgás közbeni terhelés egyenletesen oszlik el a daru futópályáin és a kerekeken. Hajtott és hajtott kerekekkel rendelkezik. Ezenkívül elektromos motorok, emelőszerkezetek, áramszedők és egyéb berendezések vannak felszerelve a kocsira.
A kocsi fékekkel rendelkezik. Meghibásodásuk esetén vannak speciális lökhárítók, amelyek segítenek neki megállni. Karbantartáshoz kapaszkodókat biztosítanak a kerület körül.
Egy vagy két gerenda használatától függően a kocsik konzolosra és támasztékra oszthatók. Az emelőszerkezet típusa szerint megkülönböztetik a telphereket. Meleg és hideg éghajlaton egyaránt üzemelnek a készülékek nagy megbízhatósága miatt.

Konzolos (bal) és támasztó (jobb) forgóváz típus
 A kocsin van egy mechanizmus a rakomány emelésére és leengedésére. A horogfunkciótól függően horog- és kagylófogantyúkat különböztetünk meg.
A kocsin van egy mechanizmus a rakomány emelésére és leengedésére. A horogfunkciótól függően horog- és kagylófogantyúkat különböztetünk meg.
Ezenkívül több segéddob van felszerelve a kocsira, amelyek kisebb teherbírásúak, mint a fő. Könnyű terhek mozgatására szolgálnak.
A vonóerő növelésére szolgáló berendezésként egy adott többszörösségű láncos emelőt használnak. Ez az eszköz egy kötéllel vagy lánccal összekapcsolt blokkok rendszere.
A láncos emelő használata lehetővé teszi a kötél egyenletes feltekercselését a dobon. Erre azért van szükség, hogy a tömbtartókra nehezedő terhelést egyenlő arányban ossza el, és elkerülje a felemelt teher elferdülését és a támasztékok törését.
Ellenőrző mechanizmusok
A felső daru különböző helyekről üzemeltethető:
- a felfüggesztett kabinból;
- távolról;
- a földről.
A daru padlóról történő vezérlése a panel segítségével lehetséges. Mind vezetékes, mind rádióvezérlésű modellek. A rádiós távirányító modern és mobil. Használata hatékony, a távirányító lehetővé teszi a terhek pontos és egyenletes mozgatását. Ezek a 10 tonnáig terjedő teherbírású függődaruk a Műszaki Felügyeletnél nincsenek nyilvántartva.
Gyakran egy joystick-manipulátort használnak a daru vezérlésére. Több műveletet is tud gyorsabban végrehajtani, mint a távirányító (emelkedés, ereszkedés, megállás, gyorsítás stb.). A gombos modellek kevesebb funkcióval rendelkeznek. Ezeket a tartozékokat kis és közepes teherbírású darukhoz használják.
Ha nagy mérlegeket kell mozgatni, darut használnak, amelyet a fülkéből vezérelnek. Ezeket a termékeket fel kell venni a műszaki felügyelet nyilvántartásába. Az ilyen berendezéseken végzett munkához megfelelőségi tanúsítvánnyal rendelkező szakemberre van szüksége.
Mivel a kabin magasan helyezkedik el, potenciálisan veszélyes szerkezetekhez tartozik, és nagyobb megbízhatósággal kell rendelkeznie. A kabinban karok és manipulátorok találhatók a vezérléshez, egy kezelőülés. Fontos szempont a kabin üvegezése. A lehető legteljesebbnek kell lennie, hogy a darukezelő láthassa a rakodóterületen előforduló eseményeket. Ezenkívül sok szolgáltató rádiókommunikációt használ.

A felső daruk vezérlésének fő módjai
Daru elektromos berendezések
A daru elektromos berendezése a következőket tartalmazza:
- Elektromos motorok;
- relék, indítók, vezérlők;
- Biztosítékok, kapcsolók;
- elektromágneses fékek és így tovább.
Elektromos motorok vannak felszerelve a daru és a kocsi mozgatásához. Számuk a felvonó kialakításától és modelljétől függ. Különféle felszerelések indításhoz és leállításhoz az elektromos védelem és vezérlés szigorúan tanúsított, fokozott biztonsági és megbízhatósági követelmények vonatkoznak rá.
 A daru áramellátása kétféleképpen történik - kábel vagy kocsivezeték segítségével. A kocsis változat nagy terheket mozgató darukhoz használható. A vonalnak legalább 3,5 méter magasságban kell lennie a padlótól és 2,5 méter magasságban a hídfedélzettől. A kábelvezeték rugalmas kábel. A kocsival együtt mozog. Ehhez kocsikra van akasztva. A híd gerendájának mozgatásához az első módszert alkalmazzuk.
A daru áramellátása kétféleképpen történik - kábel vagy kocsivezeték segítségével. A kocsis változat nagy terheket mozgató darukhoz használható. A vonalnak legalább 3,5 méter magasságban kell lennie a padlótól és 2,5 méter magasságban a hídfedélzettől. A kábelvezeték rugalmas kábel. A kocsival együtt mozog. Ehhez kocsikra van akasztva. A híd gerendájának mozgatásához az első módszert alkalmazzuk.
A felső daru áramellátása a legtöbb esetben háromfázisú. Ilyen feszültségre van szükség a hálózatban, mivel az elektromos motorok jelentős áram- és feszültségszinten működnek. A felső daru elektromos vezetékére fokozott biztonsági követelmények vonatkoznak. Ez elsősorban a leállások, túlterhelések és egyéb dolgok miatt következik be. Ilyen tényezőkkel a vezetékek felmelegednek. A daru normál működéséhez kiváló minőségű vezetékekre van szükség, amelyek ellenállnak a fenti túlterheléseknek.
Kedves olvasóink! Tájékoztatjuk, hogy egyetemünk 2020-ra meghosszabbította a hozzáférést a Lan Kiadó EBS kiadói gyűjteményeihez: Matematika - Lan Kiadó; „Fizika – Lan Kiadó”; "Műszaki és műszaki tudományok – Lan Kiadó"; „Informatika – DMK Press”; "Műszaki és műszaki tudományok - DMK Press Kiadó - Dodeka-XXI"
Ezen túlmenően a jelenlegi megállapodás értelmében az Egyetem a gyűjteményektől elkülönítve kapott hozzáférést az Adatbázisban szereplő művekhez.
Az ELS lehetőségeiről bővebben az Elektronikus könyvtári rendszerek rovatban tájékozódhat
Az ELS "Ibooks" hozzáférésének megújítása
Kedves olvasóink! 2020. február 1-jétől egyetemünk hozzáférést kapott az iBooks.ru/ibooks.ru Elektronikus Könyvtári Rendszerhez, amely az oktatási és oktatási dokumentumok elektronikus változatait tartalmazza. tudományos publikációk az oktatási és tudományos tevékenység egyetemi. Hozzáférés e-könyvek közvetlenül az elektronikus könyvtári rendszer honlapján hajtják végre
Tesztelje a hozzáférést a "Zlatoust" kiadó gyűjteményéhez
Részletek Feladás dátuma: 2020.01.31Kedves olvasóink! Egyetemünk 2020.03.02. és 2020.02.03. között ingyenes teszthozzáférést kapott a Zlatoust kiadó új könyvgyűjteményéhez az ELS Lan platformon. A gyűjtemény 198 könyvet tartalmaz a „Nyelv- és irodalomtudomány” tudományterületről.
A "Zlatoust" kiadó a fejlesztésre specializálódott tananyagok orosz mint idegen nyelv (RFL). Vezető szerepet tölt be az orosz mint idegen nyelvet tanuló új oktatási anyagok fejlesztésében és előállításában.
A kohászatban és az építőiparban, in termelő műhely raktárban, szállító- és javítóműhelyekben pedig ömlesztett és veszélyes árukkal való munkavégzés során felső darukat használnak nagyméretű áruk, nem szétválasztható egységek és még sok más mozgatására. Ezt a technikát a legkülönfélébb, időnként extrém körülmények között végzett intenzív munkára tervezték.
A felső daru az áruk műhelyben, raktárban vagy más termelő létesítményben történő mozgatására szolgál. A falak mentén lefektetett darupályákon egy daruhíd mozog, a ráerősített teherkocsival, amely emeli és süllyeszti a terhet.
A híd kialakítása szerint a daruk a következőkre oszthatók:
- Egysugarú. A híd egy I-szelvényű gerendából áll, melynek végeibe futókerekes véggerendák vannak beépítve. A fő rakománykocsi mellett további konzolos típus is beépíthető. Az ilyen típusú daruk könnyűek, de emelőképességük általában nem haladja meg a 10 tonnát.
- Dupla gerenda. Szerkezetileg a híd két merev gerendából áll, amelyek véggerendái futókerekekkel vannak felszerelve. A teherkocsi a fő mellett kiegészítő teheremelő mechanizmusokkal is felszerelhető. Ez a fajta daru rendelkezik nagy teherbírás, a vezérlés a fülkéből vagy távolról történik.
Egy híd vázlata, felső daru 
A rögzítés típusa szerint a felső daruk 2 típusra oszthatók:
- Felfüggesztett. A teherkocsi a hídgerenda alsó síkja mentén mozog.
- Támogatás. A teherkocsi a tartógerenda felső síkja mentén mozog. Ez a kialakítás maximális terhelhetőséget biztosít.
A hagyományostól eltérő, párhuzamos darupályákon haladó felső daruk többféle típusa létezik:
- Sugárirányú. A daru forgatása a gyűrűs sín mentén történik egy mereven rögzített középpont körül munka oldal támogatja.
- akkordát. A mozgás a gyűrűsín mentén történik. A tervezési jellemzők miatt a daru által kiszolgált gyűrű területe kisebb, mint az azonos forgási sugarú radiálisé.
- Gyűrűs. A daru két különböző átmérőjű kör alakú sín mentén mozog. A csúszás elkerülése érdekében a futókerekek különböző átmérőjűek.
- Fordulás. A daru hídja megegyezik a gyűrű alakú sín átmérőjével, amely mentén a mozgás történik. A radiálistól eltérően nincs központi tartógerenda, és a daru a daru futópályái által határolt kör bármely pontján végezhet be- és kirakodási műveleteket.
A fő munkaeszközön kívül horog, daru kapaszkodóval, mágneses markolattal is felszerelhető.
Felső daru készülék
A felső daru általános berendezése egy- vagy kétgerendás hídból, azon haladó teherkocsiból áll. A szükséges elektromos és mechanikai alkatrészeket mind a hídon, mind a forgóvázon felszerelik. A mechanizmus vezérlése függesztett kabinból vagy távirányítóról történik, amikor a kezelő a műhely padlóján vagy a munkaállványon kívül tartózkodik.
A daru futópályáinak felszerelése szabadon álló daruállványon és a műhely padlójának, oszlopainak, tetőtartóinak felhasználásával is elvégezhető.
A képen a híddaru készüléke 
Ezután vegye figyelembe a felső daru különféle mechanizmusainak eszközét.
Fékrendszer
A rakomány megtartásához vagy mozgási sebességének szabályozásához (fék kioldása), állítsa le a daruhíd vagy a teherkocsi mozgását (kioldó fék) a fékrendszer. Hagyományosan az emelőszerkezetek zárt (zárt) fékeket használnak, hogy megakadályozzák a mozgást normál állapotban. Ha megnyomja a pedált vagy a fogantyút, a mechanizmus kiold. Nál nél vészhelyzet, bármely daruszerelvény meghibásodása vagy leállása esetén az ilyen fékmechanizmus automatikusan működésbe lép.
A fékpofa simább és gyorsabb fékezést biztosít.
Ha a rakománykocsi mozgását legfeljebb 32 m/perc sebességgel hajtják végre, nincs szükség fékrendszerre, mert. a kerékcsapágyak súrlódási veszteségei és a síneken való gördülés biztosítja a stabil lassulást.
Ezt az utat, amelyen a kocsi a fékezés megkezdésétől kezdve teljesen megállt, fékútnak nevezzük.
Emelő mechanizmusok
A darus kocsin van egy mechanizmus a rakomány emelésére és leengedésére. A fő mellett egy vagy két segédmechanizmus is használható, amelyek teherbírása daruosztálytól függően 3-10-szer kisebb a fő teherbírásánál.
Ezek bármelyikének összetevői a következők:
- Hajtómotor.
- erőátviteli tengelyek.
- Csökkentő.
- Teherkötelek dobbal a tekercseléshez.
A felső daru emelőszerkezetének vázlata 
A 80 tonnát meghaladó terhekkel való munkavégzéshez további sebességváltót vagy reduktort használnak.
A tapadás növelésére láncos emelőt használnak, melynek leggyakoribb típusa a dupla többszörös. Ennek köszönhetően a kábel mindkét végéről egyenletesen feltekercselődik a dobra, így lehetővé válik a dobtámaszok és a híd teljes fesztávjának terhelése kiegyensúlyozása.
Darunyomok
 A darupályák célja az, hogy egyenletes eloszlás a felső daru súlya az alapzaton és a darugerenda mozgása ezeken az utakon. A kis teherbírású egygerendás daruk megtámasztásához hagyományos vasúti síneket használnak vezetőként. A 20 tonna vagy annál nagyobb teherbírású mechanizmusokhoz speciális darusíneket használnak. Ezek alapja leggyakrabban egy acél I-gerenda.
A darupályák célja az, hogy egyenletes eloszlás a felső daru súlya az alapzaton és a darugerenda mozgása ezeken az utakon. A kis teherbírású egygerendás daruk megtámasztásához hagyományos vasúti síneket használnak vezetőként. A 20 tonna vagy annál nagyobb teherbírású mechanizmusokhoz speciális darusíneket használnak. Ezek alapja leggyakrabban egy acél I-gerenda.
Figyelembe véve magának a darunak és a terhelésnek a súlyát, valamint a daru futópályái mentén történő mozgás sebességét, fokozott követelményeket kell támasztani a beépítésük minőségével szemben, kizárva a daru kisiklásának lehetőségét. Ennek elkerülése érdekében a kerekek szélességének meg kell haladnia a használt sínek szélességét. Tehát hengeres kerekek használatakor szélességüknek legalább 30 mm-rel nagyobbnak kell lennie, mint a sín szélessége. A ferde kerekek esetében ennek az értéknek legalább 40 mm-nek kell lennie.
A síneket hőréssel kell lefektetni, és a magasságkülönbség rajtuk nem haladhatja meg a 2 mm-t. Nál nél nagy értékek erős lökés terhelés van a kerekeken.
A felső híddaru esetében a darupálya szerkezet egy gerenda, leggyakrabban egy I-gerenda, amely a helyiség tetőtartóira van rögzítve, miközben a rakomány kocsi ennek a gerenda alsó síkjának mentén mozog (erre van felfüggesztve). ).
Elektromos felszerelés
Különleges követelmények támasztják a felső daruk elektromos berendezéseit, beleértve azt az üzemmódot, amelyben egy órán belül akár több száz rövid távú ki- és kikapcsolás is végrehajtható, a darukocsi és a daru gyorsítása, fékezése során fellépő túlterhelések. magát, és az utazási sebesség változásait.
A híd és a teherkocsi mozgatását, a rakomány kezelését a futódaru fő elektromos berendezései biztosítják.
Az elektromos berendezések a következőket tartalmazzák:
- Elektromos motorok. 3 vagy 4 motor van felszerelve, amelyek közül 2 kocsira van felszerelve a teher emelésére / leengedésére, a hídgerenda mentén történő mozgatására, és 1 vagy 2 motor biztosítja a daru gerenda mozgását a daru vágányai mentén.
- Vezérlőberendezések (relék, vezérlők, indítók stb.).
- Elektromos védelmi eszközök (biztosítékok, megszakítók stb.).
- Eszközök, amelyek biztosítják a daru fékrendszerének működését.
Egy felső daru elektromos rajza 
Villamos segédberendezések tartalmazzák világítás, kabin fűtési rendszerek, hang és így tovább. riasztó stb.
A daru áramellátása kétféleképpen történik:

Függődaru-vezérlő mechanizmusok és berendezések
A Gosgortekhnadzor szabályzata egyértelműen meghatározza az ellenőrzési mechanizmusokra és berendezésekre vonatkozó követelményeket, ezért e szabályzat 197., 198. és 199. cikkeit az alábbiakban közöljük.
"197. A daruvezérlő berendezéseket úgy kell elkészíteni és beszerelni, hogy a vezérlés kényelmes legyen, és ne akadályozza a teherfogó berendezés és a rakomány megfigyelését, valamint a fogantyúk, karok és lendkerekek mozgási iránya ésszerű és lehetőség szerint legyen. , megfelel az okozott mozgások irányának. Ezeken a mechanizmusokon és eszközökön fel kell tüntetni a hívott mozgások irányát bélyegzett (öntött) feliratok és nyilak formájában. A karok, fogantyúk vagy kézikerekek egyes helyzeteit rögzíteni és meg kell jelölni.
Az egyes mechanizmusok hátrameneti indítására szolgáló gombokat reteszelni kell, hogy megakadályozzák az irányváltó kontaktorok egyidejű aktiválását.
"198. A padozatról vezérelt darugerendákon alkalmazott kézi vezérlés indítóberendezéseinek (vezérlők, késes kapcsolók) rendelkezniük kell a nulla helyzetbe önvisszaállító berendezéssel. Ilyen esetekben a mágneskapcsolók bekapcsolt állapotban tartása csak az indítógomb folyamatos lenyomásával lehetséges.
A vezérlőberendezések felfüggesztését olyan hosszúságú acélkábelen kell végrehajtani, amely lehetővé teszi, hogy a mechanizmust kezelő személy biztonságos távolságban legyen a felemelt tehertől. Ha a vezérlőkészülék a padlótól 0,5 m alatt van, akkor a kábelre erősített kampóra kell akasztani 1-1,5 m magasságban.
199. Vezérlővezérlésű elektromos működtetésű szelepeknél a védőpanel mágneskapcsolójának bekapcsolása csak akkor lehetséges, ha minden vezérlő nulla pozícióban van.
 A világ legelső erőműve
A világ legelső erőműve Ara életmód és élőhely
Ara életmód és élőhely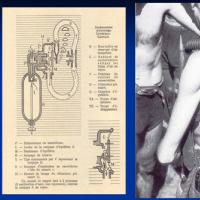 Denise "búvárcsészealja"
Denise "búvárcsészealja" Levél a Rosstattól ingyen!
Levél a Rosstattól ingyen! Erősítjük a Yota-modem jelét. Nem stabil jelű yota
Erősítjük a Yota-modem jelét. Nem stabil jelű yota Hogyan töltsön internetet az országban túlfizetés nélkül: tippek és utasítások Internet az országban mit válasszon
Hogyan töltsön internetet az országban túlfizetés nélkül: tippek és utasítások Internet az országban mit válasszon Mobil Internet Skylink Berendezések és SIM-kártyák vásárlása
Mobil Internet Skylink Berendezések és SIM-kártyák vásárlása